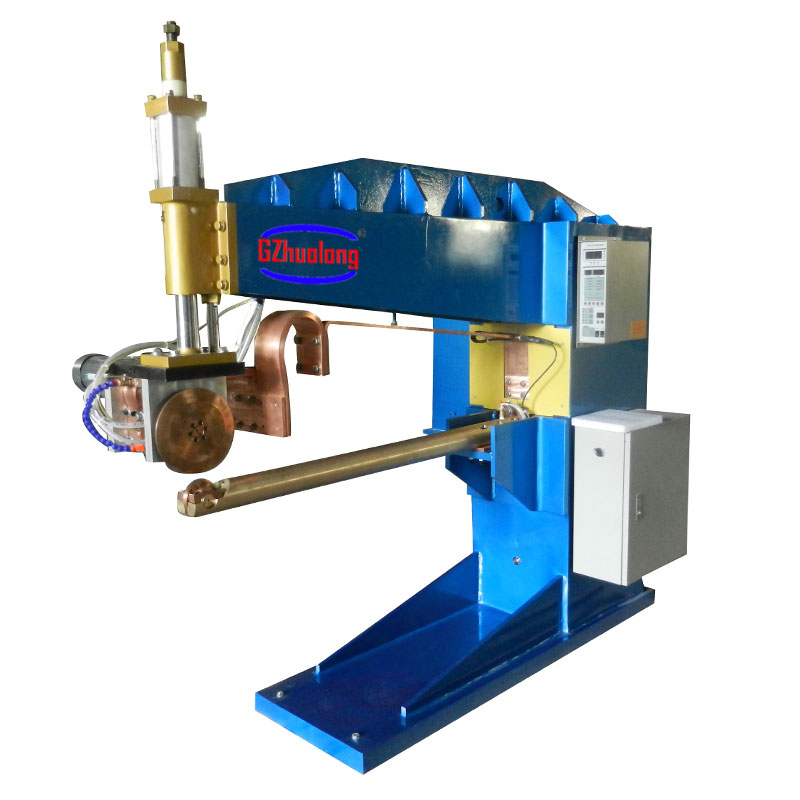
Сварочные роботы в основном состоят из двух частей: роботов и сварочного оборудования.
Свяжитесь с намиСварочные роботы в основном состоят из двух частей: роботов и сварочного оборудования.Робот состоит из корпуса робота и шкафа управления (аппаратного и программного).Сварочное оборудование, например, для дуговой и точечной сварки, состоит из источника питания для сварки (включая систему управления), устройства подачи проволоки (дуговая сварка), сварочной горелки (плоскогубцы) и других деталей.
Роботы для дуговой сварки в основном используют методы сварки в среде защитного газа (MAG, MIG, TIG), а для дуговой сварки на роботе могут быть установлены обычные тиристорные, инверторные, импульсные или неимпульсные источники питания с регулируемой формой волны.
Механизм подачи проволоки может быть установлен на плече робота или снаружи него. Шланг между сварочной горелкой и устройством подачи проволоки укорочен, что способствует поддержанию стабильности подачи проволоки.
Сварочные роботы - это, в основном, роботы для соединения швов, большинство из которых имеют 6 осей.
С развитием электронных технологий, вычислительной техники, ЧПУ и робототехники, автоматических сварочных роботов, с тех пор как они начали использоваться в производстве в 1960-х годах, их технология становилась все более совершенной, в основном благодаря следующим преимуществам:
1.Стабилизировать и улучшить качество сварки, а также отразить качество сварки в виде значений.
2.Повышение производительности труда.
3.Повышают трудоемкость работников и позволяют работать во вредных условиях.
4.Снижает требования к технологии работы работника.
5.Сокращен цикл подготовки к модификации и замене продукта, а также соответствующие инвестиции в оборудование.
Поэтому он широко используется во всех сферах жизни.
Основные параметры:
| Вертикальный многосуставной робот | |||||||
| модель | RH14-10-W | RH-18-20-W | RH-20-10-W | ||||
| Входное напряжение | 3 фаза 380V 50/60HZ | 3 фаза 380V 50/60HZ | 3 фаза 380V 50/60HZ | ||||
| Мощность | 3KVA | 5KVA | 5KVA | ||||
| Свобода передвижения | 6 | 6 | 6 | ||||
| Максимальная нагрузка | 10kg | 20kg | 10kg | ||||
| Диапазон движения и максимальная скорость | J /JT | Диапазон движения | максимальная скорость | Диапазон движения | максимальная скорость | Диапазон движения | максимальная скорость |
| 1 | ±167° | 169°/s | ±167° | 169°/s | ±167° | 169°/s | |
| подвеска±30° | подвеска±30° | подвеска±30° | |||||
| 2 | 0°-175° | 169°/s | 0°-175° | 169°/s | 0°-175° | 169°/s | |
| 3 | +80°--150° | 169°/s | +80°--150° | 169°/s | +80°--150° | 169°/s | |
| 4 | ±190° | 280°/s | ±190° | 280°/s | ±190° | 280°/s | |
| 5 | -105°--130° | 240°/s | -105°--130° | 240°/s | -105°--130° | 240°/s | |
| 6 | ±210° | 520°/s | ±210° | 483°/s | ±210° | 483°/s | |
| Допустимая нагрузка на запястье | J /JT | момент силы | момент инерции | момент силы | момент инерции | момент силы | момент инерции |
| 4 | 10.0 N·m | 0.25 kg·㎡ | 48.0 N·m | 1.8 kg·㎡ | 10.0 N·m | 0.25 kg·㎡ | |
| 5 | 10.0 N·m | 0.25 kg·㎡ | 48.0 N·m | 1.8 kg·㎡ | 10.0 N·m | 0.25 kg·㎡ | |
| 6 | 3 N·m | 0.05 kg·㎡ | 28 N·m | 0.8kg·㎡ | 3 N·m | 0.05 kg·㎡ | |
| вес | 170kg | 285kg | 290kg | ||||
| Точность повторного позиционирования | ±0.08mm | ||||||
| Уровень шума | <70dB(A) | ||||||